Projects
Mixed-Reality Testbed for Autonomous Driving
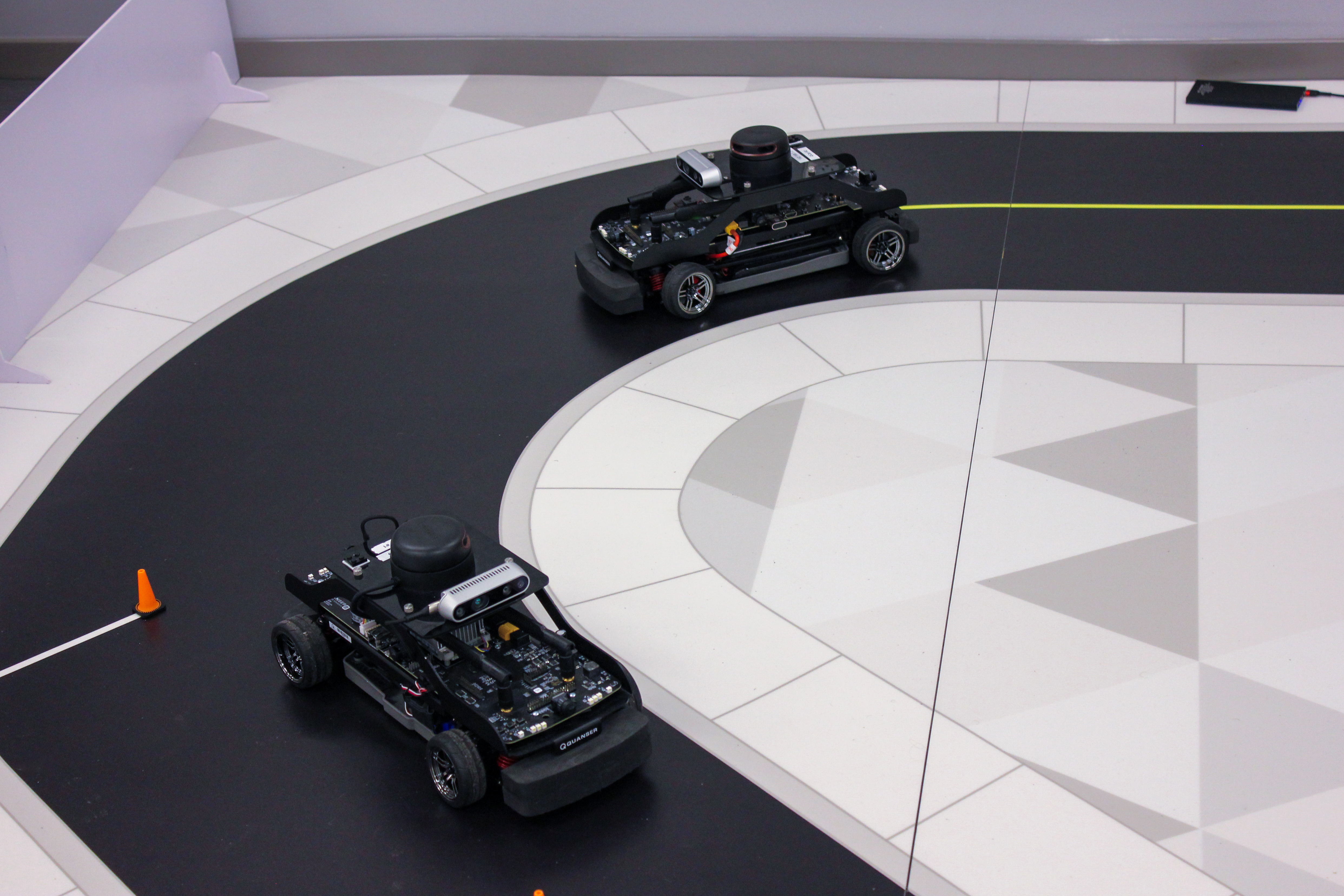
Developed a mixed-reality testbed combining virtual and physical Quanser QCars; studied effects of time delays, vehicle dynamics, and communication policies on String Stability.
Tech: Mixed Reality, Autonomous Driving, String Stability
Multi-Agent Intersection Management
Implemented a DDPG-based multi-agent intersection management algorithm using sequential optimization; developed centralized control and communication pipelines for mobile robots.
Tech: Reinforcement Learning, Multi-Agent Systems, Robotics
Multi-Objective Control
Implemented multi-objective reinforcement learning algorithms and an HJ Reachability-based method for Pareto Front recovery for nonlinear systems.
Tech: Reinforcement Learning, Control Theory, HJ Reachability
Lane Change for Vehicular Platoons
Developed a CACC-based longitudinal controller and safe decision-making planner for autonomous vehicle platoons; tested in CARLA.
Tech: Simulink, CARLA, CACC, Path Planning
Event-Triggered Control using Reinforcement Learning
Developed a DDPG-based event-triggered controller for LTI systems with stability guarantees; implemented classical event-triggering methods.
Tech: Reinforcement Learning, Event-Triggered Control, Control Systems
UAV-assisted UGV Navigation
Designed mapping and navigation algorithms for UAVs in mountainous environments and developed UGV controllers using ROS and OpenCV.
Tech: ROS, UAVs, UGVs, Computer Vision
Control and Navigation of Mars Rover
Developed vision-based autonomous navigation for a Mars rover and a mobile-follower robot; indoor mapping with RTAB-map.
Tech: Computer Vision, Robotics, RTAB-map, OpenCV
Control and Navigation of a Self-Balancing Bike
Modeled and controlled a self-balancing flywheel-based bike; developed GPS and LiDAR-based navigation algorithms.
Tech: Control Theory, PID, Robotics, ROS, Gazebo